This is the last post (for a while) in this series on hacking together a pair of Heads-Up-Display snowboard goggles. At some point in the future I might revisit this and add in some more sensors and update the display -- I still haven't added in the temperature sensor and there are some really easy things to do in Python to add more functionality (e.g. keeping track of maximum speed, stopwatch functionality etc). This picture shows all the components put together.
This video shows the goggles now that I've hot glued the MyVu components in. It's a bit of a mess and probably needs another layer of foam added around the outside to hide all the glue and put a bit more separation between your face and the MyVu.
I've also recorded one more video showing the view through the goggles.
So in summary, it seems it is possible to hack together something that approximates a pair of Heads-Up-Display snowboard goggles. Although I'm not too sure about actually carrying around all that kit for real. Also probably best not to be strapping things to your face that could poke out your eyes during an accident.
The full listing of parts for my hacked together version is below...
Raspberry Pi - RS Components £25.92
SD Card - RS Components - £7.79
Anker Astro 3E 10000mAh battery pack - Amazon - £29.99
2013 Rayzor Pro Goggles - Amazon - £19.59
Ultimate GPS Breakout - Cool Components - £28.54
MyVu glasses - ebay - about £40
USB to TTL to UART RS232 COM Cable - Anmazon £4.66
Various USB cables, bits of wire etc. less than £5
So the total for all this would be about £160! Thankfully I had a lot of this already anyway from other projects. I guess it shows that the Recon glasses are actually quite good value for the technology that you are getting and the functionality that it offers.
If I end up getting a pair of the proper Recon goggles I'll have a play with the SDK and see what else interesting could be done with a properly engineered product!
Oh, and #IfIHadGlass, I'd start with reimplementing this, before getting on to a load of other projects I'd like to try :)
I'm going to take the glasses out today and try them outside with the battery pack. Before that I thought I'd make a quick summary of the setup and show all the components finally put together.
Below is a video showing all the wearable components in my jacket (sorry the video is a bit shaky).
The first video from inside the glasses is below. I'm not that happy with it really. I will try to make a better one when I get some time over the next couple of days.
The goggles I'm going to try and integrate this HUD with are 2013 Rayzor Pro from Amazon. More details are here. I actually bought these to go snowboarding, so I've just ordered another pair so that it doesn't matter that I'm about to destroy the first pair that I bought.
I spent quite a lot of time trying to get the displays to sit at the bottom of the goggles so that you look down to see the display
The problem is that without separating the two displays, i.e. breaking the central part of the MyVu (and I don't know what runs through the middle), for the displays to be low enough to not obstruct your actual view, the plastic hits your nose when the goggles are on.
Eventually I started think about whether the displays could sit at the top of the goggles. There is already a large area that isn't visible (some foam and vents) so I started trying to fix the displays in position at the top of the goggles.
I cut some holes in the foam so the cables for display and earphones cold easily come out of the goggles. I haven't found a good way of holding the displays in place yet so I've just opted for some temporary fixes to see if it all works. You can just see the HUD being displayed in the picture below.
It looks really clunky in the picture, but when you wear it it actually hardly obstructs your view at all.
I have a short video where I've tried to capture what you see but it is quite hard to film. Any ideas to make this better please let me know.
I've finally got to the point where I need to dismantle the MyVu glasses....
Basically after a combination of prising bits of plastic off, the occasional M5 screw that can be removed, I managed to get most of the casing removed. Sorry I didn't create a proper set of instructions on how to dismantle but I didn't really know what I was doing until it was finished.
The front bit of plastic was quite easy just to prise off using a screwdriver.
There are then some M5 screws on the bottom that are accessible
You can also get access to another two screws under plastic caps. One came out easily, the other I drilled out.
at which point most of the plastic can be removed
I kept testing to make sure that nothing I had done had broken a connection to the display.
I thought I was going to just use one of the screens but if I disconnected the brown ribbon cable from any the second screen the first one didn't display either. Therefore I'm going to have to (for now) integrate both screens into the goggles.
After removing as much of the plastic as I could and stripping the arms I've ended up with this:
I then taped up most of the loose and exposed cables. I now need to figure out if it can be embedded in some goggles...
Now that the battery pack has arrived I can now think about making this mobile.
Before I get on to connecting up the battery, I need to make the display script start up automatically, since when it is out and about it wont have a keyboard attached in order to load the script.
Running scripts on startup can be achieved in a number of ways. I wish I could find a decent article somewhere that descripbes all the different methods and why you might choose one over the other. I have in the past modified the .profile file within the user's home folder, but in this case I need to run scripts using sudo, and I haven't been able to do that using the .profile. Therefore what I've done is used the guide from here. First I created a new file called rungui.
sudo nano /etc/init.d/rungui
and put this text into it
#! /bin/sh
# /etc/init.d/rungui
### BEGIN INIT INFO
# Provides: noip
# Required-Start: $remote_fs $syslog
# Required-Stop: $remote_fs $syslog
# Default-Start: 2 3 4 5
# Default-Stop: 0 1 6
# Short-Description: Simple script to start a program at boot
# Description: A simple script which will start / stop a program a boot /$
### END INIT INFO
echo 'called rungui script'
sudo killall gpsd
sudo gpsd /dev/ttyUSB0 -F /va
sudo python /home/pi/test_gui3.py
exit 0
The important lines are at the bottom
The two lines that refer to gpsd have been added since for some reason my GPS has stopped working unless you do this on every boot. I have no idea why, I don't think I have changed anything since I first got this working, but eventually I found I could fix it with these two lines. So I'm calling them on every boot of the pi.
The script is then called suing python /home/pi/test_gui3.py. I should probably rename that something sensible at some point.
Once this file is created run:
sudo update-rc.d rungui defaults
and the script should be launched automatically when the pi boots.
For the GPS integration, the articles from Kevin Townsend have been invaluable. The hardware I'm using is the Ultimate GPS Breakout Board. Mine was from Cool Components in the UK.
As per the suggestion in Kevin's article I'm also using a USB to serial converter rather than using the GPIO pins directly. I got this from Amazon UK (http://www.amazon.co.uk/gp/product/B008AGDTA4)
This worked just by plugging it into the Raspberry Pi and is accessible probably as:
/dev/ttyUSB0
The instructions on Kevin's page are really comprehensive so I wont repeat them here. The only mistake I made was in connecting the GPS breakout to the serial.
The coloured cables from the USB to serial are:
Red VCC
Black GND
Green TXD
White RXD
Everytime I do something with serial I do this wrong, and it is completely logical I just seem to do it wrong every time! The TXD from the USB to serial needs to connect to the RX on the GPS breakout. I've put a picture below. Sorry the cables for TX and RX are both yellow, it doesn't help with the understanding but it's all I had.
Once you get it all working, on the Raspberry Pi if you run
# coding=UTF-8 import pygame import sys import datetime import gps def draw_borders(screen): """Draws some simple borders to the display""" pygame.draw.lines(screen, (255, 255, 255), False, [(0, 30), (width, 30)], 2) def draw_time(screen): """Draws the time to the display""" the_time = datetime.datetime.now() time_as_string = the_time.strftime('%H:%M') font = pygame.font.Font(None, 42) text = font.render(time_as_string, 1, (255, 255, 255)) textpos = text.get_rect(centerx=screen.get_width()/2, centery=15) screen.blit(text, textpos) # paste the text into the background def draw_speed(screen, the_speed): """Draws the speed to the display""" # get the speed... if the_speed: the_speed_string = '{} kph'.format(int(the_speed)) # display as whole number else: the_speed_string = '-- kph' font = pygame.font.Font(None, 160) text = font.render(the_speed_string, 1, (255, 255, 255)) textpos = text.get_rect(centerx=screen.get_width()/2, centery=screen.get_height()/2) screen.blit(text, textpos) # paste the text into the background def draw_altitude(screen, the_altitude): """Draws the altitude to the display""" if the_altitude: the_altitude_string = '{} m'.format(the_altitude) else: the_altitude_string = '-- m' font = pygame.font.Font(None, 65) text = font.render(the_altitude_string, 1, (255, 255, 255)) textpos = text.get_rect(centerx=120, centery=screen.get_height()-20) screen.blit(text, textpos) # paste the text into the background def draw_temp(screen): """Draws the temperature to the display""" the_temp = 0 the_temp_string = u'{}°C'.format(the_temp) font = pygame.font.Font(None, 65) text = font.render(the_temp_string, 1, (255, 255, 255)) textpos = text.get_rect(centerx=screen.get_width()-80, centery=screen.get_height()-20) screen.blit(text, textpos) # paste the text into the background if __name__ == '__main__': pygame.init() size = width, height = 650, 400 black = 0, 0, 0 screen = pygame.display.set_mode(size) # set up gps if possible gps_session = gps.gps("localhost", "2947") gps_session.stream(gps.WATCH_ENABLE | gps.WATCH_NEWSTYLE) speed = None altitude = None while True: # Checks for key presses, e.g. escape to quit for event in pygame.event.get(): if event.type == pygame.QUIT: sys.exit() if event.type == pygame.KEYUP and event.key == pygame.K_ESCAPE: sys.exit() # Fill the screen with black background screen.fill(black) # get GPS data gps_report = gps_session.next() altitude_temp = gps_report.get('alt') speed_temp = gps_report.get('speed') # need to do this temp stuff otherwise it flickers # back to '--' if gps is temporarily lost if altitude_temp: altitude = altitude_temp if speed_temp: speed = speed_temp # Draw all the stuff draw_borders(screen) draw_time(screen) draw_speed(screen, speed) draw_altitude(screen, altitude) draw_temp(screen) # Update the display pygame.display.flip()
And the output:
I haven't been able to test the speed yet until I get a battery pack, but you can see that the altitude has been updated.
It is also worth looking at the other details that are stored within the gps_report variable. The Python dictionary keys are in italics.
longitude lon
latitude lat
time time
altitude alt (m)
speed speed (kph)
climb climb (m/min)
heading track (degrees) (I think)
Might be able to add more of this information in later.
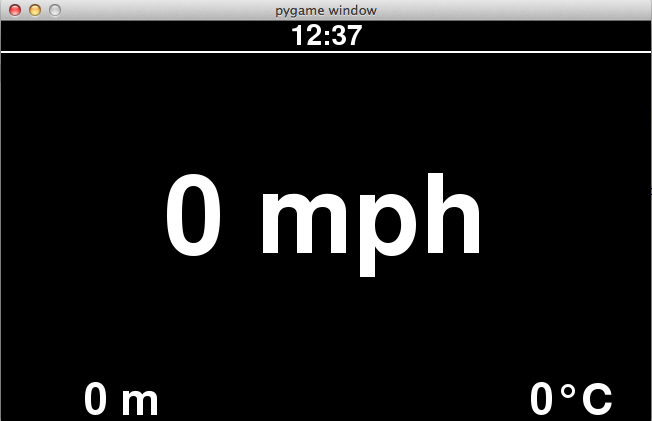
This posts describes the construction of a basic display with some placeholders.
The idea is to produce something like this that displays the speed, altitude and temperature.
I'm using a Raspberry Pi and I want to avoid booting into the GUI so I need a way of creating a graphical display from the terminal display. I discovered that this is possible using Python and PyGame.
I think this was already installed but in case it isn't, the easiest thing to do is use aptitide to install python setup tools and then you can install any packages you want.
then you can use pip to install other Python packages e.g. PySerial
sudo pip install pyserial
So to create the display I'm going to use PyGame. This may not be the most sensible thing to do, but it does seem to work. Alternative suggestions welcome.
I used a PyGame tutorial from Pete Shinners to get me started, which was very helpful.
This first version of the display creates some text in fixed positions in the display as placeholders until I can actually start reading some data. There are also a lot of hard coded positions , which at the moment doesn't matter because it is set up to be displayed on the MyVu glasses.
# coding=UTF-8 import pygame import sys import datetime def draw_borders(screen): """Draws some simple borders to the display""" pygame.draw.lines(screen, (255, 255, 255), False, [(0, 30), (width, 30)], 2) def draw_time(screen): """Draws the time to the display""" the_time = datetime.datetime.now() time_as_string = the_time.strftime('%H:%M') font = pygame.font.Font(None, 42) text = font.render(time_as_string, 1, (255, 255, 255)) textpos = text.get_rect(centerx=screen.get_width()/2, centery=15) screen.blit(text, textpos) # paste the text into the background def draw_speed(screen): """Draws the speed to the display""" # get the speed... the_speed = 0.0 the_speed_string = '{} mph'.format(int(the_speed)) # display as whole number font = pygame.font.Font(None, 160) text = font.render(the_speed_string, 1, (255, 255, 255)) textpos = text.get_rect(centerx=screen.get_width()/2, centery=screen.get_height()/2) screen.blit(text, textpos) # paste the text into the background def draw_altitude(screen): """Draws the altitude to the display""" the_altitude = 0 the_altitude_string = '{} m'.format(the_altitude) font = pygame.font.Font(None, 65) text = font.render(the_altitude_string, 1, (255, 255, 255)) textpos = text.get_rect(centerx=120, centery=screen.get_height()-20) screen.blit(text, textpos) # paste the text into the background def draw_temp(screen): """Draws the temperature to the display""" the_temp = 0 the_temp_string = u'{}°C'.format(the_temp) font = pygame.font.Font(None, 65) text = font.render(the_temp_string, 1, (255, 255, 255)) textpos = text.get_rect(centerx=screen.get_width()-80, centery=screen.get_height()-20) screen.blit(text, textpos) # paste the text into the background if __name__ == '__main__': pygame.init() size = width, height = 650, 400 black = 0, 0, 0 screen = pygame.display.set_mode(size) while True: # Checks for key presses, e.g. escape to quit for event in pygame.event.get(): if event.type == pygame.QUIT: sys.exit() if event.type == pygame.KEYUP and event.key == pygame.K_ESCAPE: sys.exit() # Fill the screen with black background screen.fill(black) # Draw all the stuff draw_borders(screen) draw_time(screen) draw_speed(screen) draw_altitude(screen) draw_temp(screen) # Update the display pygame.display.flip()
And what this produces is:
You can see that this is actually being run on a Mac, which is good for editing the display layout, maybe doing some keyboard based control later, but the actual display needs to run on the Pi connected to the glasses.
You can see the same here being displayed in the glasses.
As a side note, I'm actually getting the code onto the Pi by copying it to a public dropbox folder and downloading with wget. I'm doing a lot of this through SSH-ing into the Pi, but I don't know how to start the script from the remote login and have the display update on the glasses that are connected via composite. Please let me know if you know if this is possible. You can just about hear from the video that I have a keyboard connected the the Pi in order to run the Python script.
I also had to mess around quite a lot with the resolution of the display. If the MyVu didn't like the resolution I would get a blank screen inside the glasses and couldn't get rid of it without restarting the Pi. The line configuring the PyGame display:
size = width, height = 650, 400
isn't the maximum resolution that I could probably use, but it does work.
What I'm going to first is just think about some of the components. I'm ignoring all the sensors here which wil get added as we progress.
Display
In terms of the display what I have lying around is a pair of MyVu Solo Plus video display glasses. I think mine were from e-bay for about £35. It is definitely possible to pull the LCDs out of these glasses because it's been done on Hack a Day. For now I'm going to leave the LCDs inside the MyVu though.
For processing data, running the display etc. I think I'm going to use a Raspberry Pi (at least for now). It will output composite display, which is what the MyVu wants. It should also be very easy to program, and allow connection of other sensors. In addition to the Pi, as standard I tend to get an Edimax Nano USB Wifi dongle, just becasue it makes interaction with the Pi easier (mine was from Amazon).
So this is the first post in this wearable computing blog. I got this idea when I was looking for a cheap pair of goggles for my first trip snowboarding. Unsurprisingly this research turned into an internet wandering into the most expensive and gadget ridden goggles that are available!
This led me to Recon Instruments (http://reconinstruments.com/products/snow-heads-up-display), who sell a heads-up-display for skiing or snowboarding that can provide information such as speed, jump airtime, etc. though built-in GPS. It can also connect to your smartphone via bluetooth.
While I would love a pair of these goggles as they look amazing (particularly when there is an SDK), for a first trip, they seem a little extravagant. Nevertheless, being a bit a geek, it did make me wonder about how close I could get to this functionality with some DIY hacking.